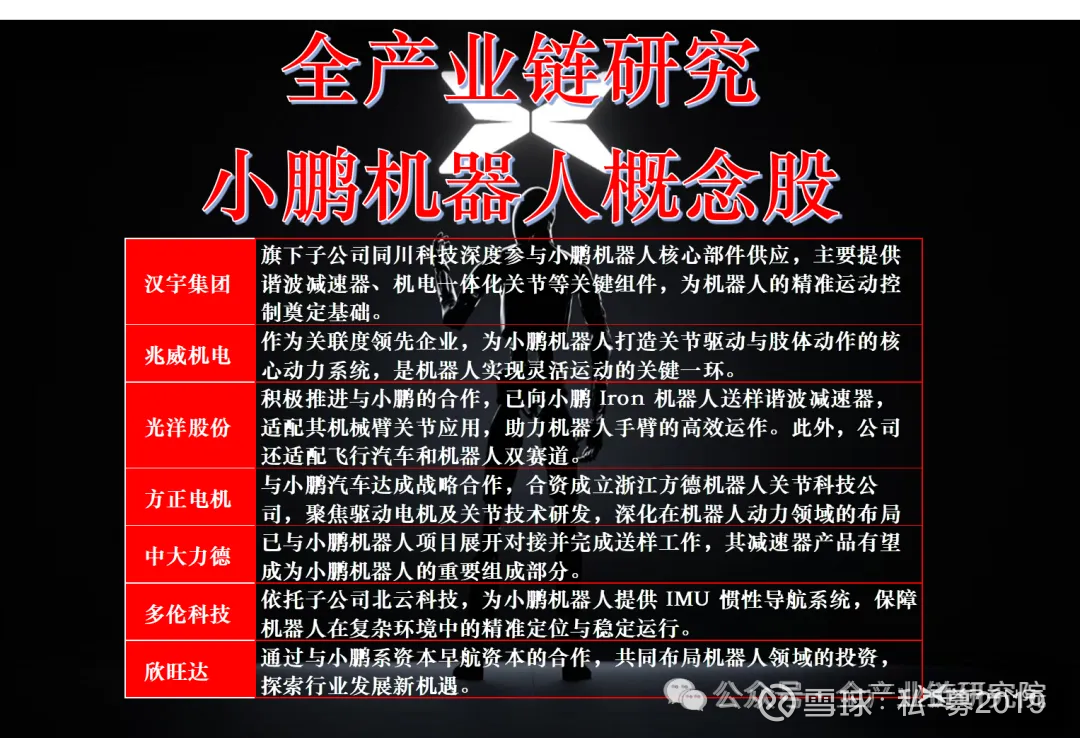
小鹏机器人调研核心纪要(附小鹏机器人概念股)

1、智能架构功能与协同
VLT核心功能与作用: VLT是机器人的大脑与决策核心,作为专门为机器人研发的自主行动核心引擎,聚焦高层决策与任务分解。其核心特点包括深度思考与自主决策,通过融合视觉感知、语言指令生成高层任务规划,如从A点到B点、拿起桌子上的杯子等任务。VLT具备类人逻辑推理能力及环境理解与场景适配能力,能够识别地面障碍物、理解用户意图并根据场景调整任务规划。同时,其可整合视觉、语言、触觉等多模态数据,形成对环境的全面认知,将复杂任务拆解为原子子任务。例如,将‘捡起地上的螺丝’拆解为走到螺丝位置、弯腰、伸手抓取,并规划最优路径(如避开人群、选择最短路线),还具备自我学习与进化能力。
VLA动作执行与调整: VLA是机器人的小脑与动作执行核心,负责将VLT的决策转化为具体动作。其核心特点包括端到端动作生成,去除语言转译环节,直接从视觉信号生成动作指令,实现所见即所动的实时响应;具备物理世界理解能力,通过模拟物体重量、硬度、材质等物理属性及摩擦力、重力等环境交互规律,确保动作精准连贯;支持实时动作调整,通过关节角度传感器、力矩传感器反馈机制实时调整动作以保持平衡。此外,VLA具有跨域驱动能力,可跨汽车、Robot Taxi、机器人、飞行汽车等域驱动,并复用车端自动驾驶技术,同时需要高算力支撑。
VLM语义交互与修正: VLM是机器人的交互与理解核心,聚焦用户意图与环境语义交互,为任务规划提供语义支撑。其功能包括自然语言交互,支持‘你好,你帮我拿一下水杯’‘你帮我扫一下地’‘你帮我装一下螺丝’等自然语言对话;知识推理,可识别物体名称(如红色杯子、螺丝)并理解用户意图(如‘轻一点’需控制抓取力道);多模态语义对齐,实现图像、视频与文本的跨模态对齐(如根据‘红色杯子’识别并理解材质需轻拿轻放);实时语义修正,在动作执行过程中接收用户临时语义修正(如拿杯子时用户要求‘倒水’),并传递给VLT调整任务规划;知识构建,通过仿真与实体数据构建物理世界知识图谱,补充VLT的语义细节(如提醒轻拿轻放、注意速度等)。
三者协同机制与算力分配: VLT、VLA、VLM形成协同闭环:VLT基于视觉、语言、触觉等多模态数据融合生成高层任务规划;VLM通过语义修正(如根据杯子材质提示抓取力度)调整VLT的任务规划;VLT将任务拆解为原子子任务后,VLA生成具体动作指令(如腿部关节弯曲度、手部抓取力度),并通过关节传感器、力矩传感器实时调整动作;VLA的动作执行数据及VLM的用户语义反馈反哺VLT,优化后续任务规划,全程通过高速总线(PCIE)实现实时数据传输。算力分配方面,VLT因处理视觉、语言数据占40%;VLA因负责运动控制、实时动作指令及反馈,算力占比最大;VLM因仅需处理语义理解、意图识别等交互感知,算力占10%。
2、硬件设计与控制优化
自由度与关节设计: 埃尔机器人全身有82个自由度,其中灵巧手有22个。硬件采用仿生关节结构,如模拟猫步行走时,腿部关节角度误差小于1度。灵巧手用绿的谐波16mm微型关节,实现与人类手部长度高度一致。控制采用分布式架构,含关节、躯干、头部控制器,各负责对应部位关节(如腿部控制器控腿部6个自由度,手部控制器控手腕和手指),结合自研力控算法实现精准抓取。
稳定性控制策略: 稳定性控制靠硬件与算法协同。硬件用航天级碳纤维仿人脊椎,支持±15°侧弯及0 - 90°俯仰,配晶格弹性肌肉。软件用零力矩点(CMP)策略与推动复原策略应对外力,如被推或绊时,身体晃动≤10cm可纠正,超过则可能摔倒。
功耗平衡策略: 功耗平衡靠软硬协同。硬件用自研7纳米图灵AI芯片,功耗50瓦(比英伟达Orin X低40%),支持端到端大模型本地运行。节能策略有空闲时关部分关节电源,采用猫步动作降功耗(对算法挑战大),用任务调度算法优先处理高优先级任务,完成后关闭以省能耗。
本地算力支撑: 为确保动作实时性,机器人本地算力达2000 + TOPS,99%动作和模型推理本地完成,避免联网延迟。用知识蒸馏和量化技术将云端大模型(如VRT、VRA)压缩为本地小模型,解决本地算力不足依赖云端解析的延迟问题。
3、数据获取与训练方法
仿真模拟数据: 小鹏依托车端自动驾驶仿真平台构建高度逼真的仿真环境,生成视觉、动作等仿真数据用于训练。该方式数据生成成本低、效率高,适合大规模训练。
实体采集数据: 小鹏通过实体机器人采集真实场景数据,其L2机器人已在自家工厂和门店小规模化部署。采集的实体数据贴近真实场景,适合对模型进行微调,可提高模型在真实场景中的适应能力和泛化能力。
数据工厂作用: 小鹏在广州建立巨神智能数据工厂,用于训练数据的采集、标注与清洗。处理对象包括仿真、实体及外部数据,解决数据标准化、规模化和标注成本高的问题,为大脑和小脑训练提供高质量、大规模数据。此外,与宝钢、立讯精密、富士康、宁德时代、京东等合作的试点数据,能提供一定体量真实数据,但规模不大。
4、量产规划与成本分析
量产目标与应用场景: 人形机器人量产时间明确,2026年底为工业场景试点与规模化应用阶段,量产目标5000台;2027年进入规模化放量阶段,出货量以万为单位,主要面向钢铁厂、模具厂、制造厂、代工厂等潜在客户。当前人形机器人处于L2级别,能与人交互、听懂指令,但执行任务效率、完成率及作业效果与人工有差距,缺乏自主监督能力,需24小时实时监控,否则易出现作业质量不达标或产生废品的情况。因此,更适合应用于汽车制造、3C电子及门店导航、导购、导游等任务简单的场景,此类任务对机器人要求较低,贴合L2级别机器人的技术成熟度。
产线投资与产能: 人形机器人产线建设需配备多种自动化设备,包括用于金属骨架焊接的6轴焊接机器人(机械手/机械臂)、AGV搬运车、高精度磨床、配合AI算法的3D结构光视觉检测设备、伺服电机生产线、谐波减速器装配线及全自动化测试台架等。单条自动化装配线投资成本约8000万至1亿元,建设周期需6 - 12个月(涵盖设计、调试、验证、试生产阶段)。当前因产能未达满产、节拍及良率未提升,产线未充分利用;2027年随着良率与产能提升,单条产线理论产能可达5万台。
当前成本与目标: 当前人形机器人整机成本约30万至50万(接近50万)。成本结构中,传感器系统(如六维力传感器、720度视觉系统)占比最高;关节驱动模块次之,包含62个自由度的各类电机,其中行星滚柱丝杠单机用量20套(试做价2500元/套,量产价可降至900元/套)、谐波减速器单机用量30套(市作价1200元/套);此外,AI芯片(单机3个独立芯片)、8小时续航电池、镁铝合金骨架及VLA大模型训练费用等也构成主要成本。未来规模化量产目标成本需控制在20万至30万,低于特斯拉目标售价(约30万)。
降本策略: 规模化量产阶段降本策略包括:一是供应链垂直整合,与上游供应商合作或合资,在现有量产成本基础上再降20%;二是采用一体化压铸技术,复用广东鸿图7200吨压铸机减少零部件数量,降低骨架成本约30%;三是加速国产化替代,当前国产化率70%,目标提升至90%以上;四是优化算力,通过车端芯片算子模型全栈优化,将算力利用率从70% - 80%提升至90%以上(未来目标100%),降低AI芯片成本;五是利用规模化效应,2026年量产规模预计达5000 - 8000台,通过批量生产摊薄成本。
5、核心零部件供应链
谐波减速器供应商: 在谐波减速器领域,微型谐波减速器用于滤除谐波功能,绿的谐波先入为主参与合作,通力智能提供16毫米的谐波减速器抽样测试,未完成验证。大型斜坡减速器方面,汉宇集团旗下的铜川科技及重装科技产品用于腕部、手部、肘部等,进入进度优先于绿的谐波;中大立德提供相关产品用于直播间机器,计划2026年底量产,当前产线已搭建完成,待技术定格及工艺爬坡。小鹏对核心零部件供应商未完全定点,采用批量试点模式合作,未来综合价格、体量等多维度选择,最终定点方未确定,多家供应商均有可能。
行星滚柱丝杠供应商: 行星滚柱丝杠方面,当前机器人上主要用星舰传动的产品,其验证速度最快,已通过小鹏工厂环境测试,寿命达2万小时以上,小鹏试作订单量大。此外,双林股份、五洲新春、阿斯特等也提供产品进行测试。因小鹏人形机器人计划2026年底量产,目前未进行量产定点,采用批量试作模式合作,保留更多选择。
电机与电子皮肤供应商: 电机领域,空心杯电机供应商有方正电机(提供驱动电机)、拓普集团和兆威机电(提供集成模组试样)。五环节力矩电机方面,不可股份产品通过小鹏前期验证,方正电机产品在肩部、肘部通过测试,最终定点未确定。电子皮肤方面,汉威科技提供柔性电子皮肤用于身体、手臂等试样,颗粒传感产品集成六维力传感器,多模态感知电子皮肤仍在测试完善。汉威科技的电子皮肤因价格相对便宜,未来大概率获得定点。
轻量化材料合作: 轻量化材料应用上,主要探索PEEK类材料、纤维、工程塑料等。机器人骨骼及内部主要用铝合金或镁铝合金,表面材料探索工程塑料、纤维等。PEEK材料方面,中兴新材与小鹏合作供应树脂原料,单机用量曾超5公斤;中岩股份与小鹏联合开发低磨耗等级的PEEK产品,用于关节齿轮降噪音。纤维材料成本低,是未来量产降本方向,目前主要验证金属建绳,后续将转向纤维建绳。最终材料选择综合性能与成本,优先性能过硬且价格低廉的方案。
6、应用效率与维护成本
安装效率对比: 机器人作业效率相比人工优势显著,可达人工3倍以上,效率提升超200%。
故障率与维护成本: 当前机器人试点故障率为0.5%,维护成本占比3%-5%,主要是灵巧手关节更换。单次更换灵巧手内坏死或损坏关节成本为5000-1万元,平均约8000元,且每周更换成本近1万元。
经济性对比: 当前机器人经济性不足。其购置成本约50万元,年更换维护成本约8万元;单名工人月薪5000元,年薪约6万元,3名工人年薪合计18万元。机器人综合成本高于3名工人年薪总和,且其耐久能力不明,无法确定能否持续运行一年以上。
Q&A
Q:请介绍履历及负责的方向?
A:主要负责机器人系统架构设计、应用及应用场景开发,专业方向偏向软件端与算法端,具备应用场景能力评估的专业能力,对硬件部分有基础了解。
Q:冉冉搭载的三颗图形AI芯片算力在VLT、VLA、VLM三块模型间的分配比例及各模型算力需求特点如何?
A:算力分配中,VLT占比40%,主要用于处理视觉与语言数据以支持认知决策;VLA算力占比最大,需高算力支撑运动控制、动作生成、实时调整及反馈;VLM算力最小,仅占10%,主要用于用户意图识别、物体识别等语义理解与交互感知。
Q:埃尔机器人拥有82个自由度,在硬件层面如何实现多关节运动中的控制精准性、稳定性及功耗平衡?
A:在控制精准性方面,硬件采用仿生关节设计,配合22个自由度灵巧手使用的16毫米直径行业最小谐波关节实现1:1人手尺寸,结合自研力控算法确保抓取精准;软件采用分布式控制架构,腿部控制器控制6个自由度关节,确保动作误差。在稳定性方面,硬件通过航天级碳纤维仿生脊椎及镁铝合金轻量化骨架降低重量;软件采用动态平衡算法应对外力干扰,同时通过知识蒸馏和量化技术压缩云端大模型为本地小模型,搭配2000+TOPS本地算力实现99%动作本地处理,避免联网延迟。在功耗平衡方面,硬件采用自研7纳米图灵AI芯片支持本地大模型运行;软件通过节能策略及任务调度算法,最终通过软硬件协同实现平衡。
Q:小鹏用于训练VLT VLA模型的大数据量通过哪些途径获取?
A:小鹏主要通过仿真模拟、实体机器人采集及数据工厂三种途径获取训练数据。仿真模拟依托车端自动驾驶仿真平台构建高度逼真的仿真环境,生成视觉与动作数据,具有低成本、高效率的特点,适合大规模训练;实体机器人已在工厂车间、小鹏门店等真实场景小规模化部署,采集的真实数据可用于模型微调,提升模型真实场景适应能力与泛化能力;数据工厂负责处理仿真数据、实体数据及外部数据,解决数据标准化、规模化及标注成本问题,为模型训练提供高质量、大规模数据。此外,与宝钢、立讯精密等合作试点的机器人仅能提供小体量真实数据,规模有限。
Q:艾瑞机器人2026年规模量产的具体目标量是多少?产线搭建所需设备及固定资产投资规模如何?
A:艾瑞机器人2026年底工业场景规模化量产目标为5000台,主要聚焦汽车制造、3C电子及门店服务领域。当前人形机器人处于L2级别,能与人交互并执行指令,但执行效率、完成率及作业效果与人类存在差距,需实时监控,适合质检、巡检、导览等任务。2027年量产目标将以万为单位,面向钢铁厂、模具厂、制造厂、代工厂等上下游客户。产线搭建需配备6轴焊接机器人、AGV搬运车、高精度磨床、视觉检测设备、伺服电机生产线、谐波减速器装配线、全自动化测试台架等设备,固定资产投资规模预计为8000万至1亿元。
Q:8千万到1个亿的固定资产对应的产能是否为5000台,具体是多少?A:8千万到1个亿的固定资产不对应5000台产能。以小红项目为例,其配置四条机器人产线,当前因产线未达满产状态,实际使用两条产线即可满足需求;预计2027年产能与良率提升后,理论产量可达5万台。
Q:8千万元至1亿元的固定资产投入对应约5万台的产能,是否可以这样理解?A:可以这样理解。建设一条此类线体预计需要6-12个月,涉及设计、调试、验证及试生产等流程。
Q:当前版本机器人全身关节中,直线关节与旋转关节的数量分别是多少?A:当前版本机器人共有82个自由度,其中灵巧手占据44个自由度,剩余38个自由度分布于直线关节与旋转关节。其中直线关节约16个,旋转关节约22个。
Q:直线关节优化减少的部位可能涉及身体的哪些部位?
A:目前直线关节优化减少的具体部位尚未形成明确思路,可能涉及上肢部位,但具体优化方案仍未确定。
Q:机器人关节优化是否基于降本原因?A:是,主要为将成本控制在目标范围内。当前优化方向可能涉及上肢直线关节调整,具体方案尚未确定;下肢部分位置也需调整。目前机器人下肢髋部、膝盖、脚踝及上肢手腕、肘部等部位均设置直线关节,肩部直线关节已取消。肘部直线关节是否取消需根据作业场景判断:若仅执行焊接、拧螺丝、简单组装、巡检或门店服务等轻量任务,可取消肘部直线关节。
Q:当前机器人整机成本、成本结构及量产降本曲线情况如何?
A:当前整机成本约30万-50万元,接近50万元;量产目标成本控制在20万-30万元,低于特斯拉30万元左右的目标售价。成本结构中,传感器系统占比最高;关节驱动模块占18%成本,单机用量20套,试坐价2500元/套,量产价可降至900元/套;谐波减速器试坐价1200元/套,单机用量30套;AI芯片单机使用3个独立芯片;电池续航8小时,成本较高;另含镁铝合金骨架、VLA大模型训练费用等结构件及软件成本。未来降本措施包括:供应链垂直整合、一体化压铸、国产化替代、模型算法优化、规模化效应。
Q:人形机器人零部件的核心供应商目前合作情况如何?
A:人形机器人零部件核心供应商采用宋亚模式确定深度绑定,尚未完全定点,未来将在价格、体量、少供等多维度选择合作。具体来看,微型谐波减速器主要由绿的谐波提供,手指关节的微型谐波减速器预计绿的谐波先入为主,通力智能也提供16毫米谐波减速器并处于抽样阶段;大的斜坡减速器由汉宇集团旗下铜川科技供应,用于手部、腰部,且汉宇集团的腕部、手部、肘部斜坡减速器进入进度快于绿的谐波;通力智能也提供斜坡减速器并给小鹏验证,其16毫米斜坡减速器尚未验证完成;通用型谐波减速器由绿的谐波、通力智能、汉宇集团及中大立德共同提供,因明年年底量产,目前产线已搭建完成,待技术定格后爬坡。
Q:小鹏人形机器人项目中,当前在丝杠及相关核心零部件领域主要与哪些供应商合作?
A:在行星滚柱丝杠领域,合作供应商包括双林股份、五洲新春、苏春亚、星舰传动及阿斯特等,其中星舰传动为当前主要供应商,其验证进度最快,已通过小鹏工厂环境测试,寿命达2万小时以上,并获得较大试作订单,但尚未完全定点,合作模式为批量试点而非量产定点。空心杯电机方面,供应商包括方正电机、拓普集团、兆威机电,其中拓普集团与微机电提供集成行星齿轮箱与伺服电机的模组试样,方正电机仅提供驱动电机。五环力矩电机供应商包括方正、拓普、布可股份,布可股份产品已通过前期验证测试,方正产品在肩部、肘部通过严格测试,但最终定点均未确定。
Q:机器人用行星滚柱丝杠的主要供应商及当前验证进展如何
A:机器人用行星滚柱丝杠的主要供应商包括星舰传动、双林股份、五洲新春及阿斯特等。其中,星舰传动验证速度最快,已通过小红工厂环境测试,寿命达2万小时以上,获得小鹏较大试作订单,但合作模式为批量试做而非量产定点;双林股份、五洲新春已提供产品;阿斯特处于试样测试阶段。
Q:灵巧手健绳传动技术的供应商情况如何?
A:电绳传动目前尚未定点。当前供应商动态包括:南山智尚已向小鹏提供样品进行测试;高测股份曾为小鹏提供样品,但今年上半年已停止送样;同益中正与小鹏对接灵巧手健绳技术验证并送样。目前上述供应商均未取得正式结果。
Q:健绳目前主要使用高分子材料还是金属材料?
A:健绳目前主要使用金属材料,同时在验证纤维材料以降低量产成本,最终将采用更便宜的纤维材料。
Q:电子皮肤领域目前与哪些公司开展合作?
A:电子皮肤领域目前与汉威传感、颗粒传感等公司存在合作,但整体处于洽谈或未定点阶段。汉威科技的柔性电子皮肤覆盖身体、手臂部位,处于收样阶段但未完全定点;颗粒传感的合作涉及集成六维力传感器的电子皮肤,同样未定点。包裹式电子皮肤因集成压力、温度、湿度等多模态感知传感器,目前仍在测试完善中。此外,维维科技的电子皮肤因价格优势,未来大概率获得定点。
Q:电子皮肤的定价方式如何?是按模组计价还是按面积计算?
A:电子皮肤的定价需根据具体应用场景确定。例如,服务门店的机器人使用的电子皮肤覆盖面积较大;工厂作业机器人使用的电子皮肤覆盖面积较小,且材质可能存在差异。
Q:目前在机器人轻量化方面采用了哪些材料?
A:轻量化材料主要采用PEEK类材料,用于减重;内部骨骼以铝合金或镁铝合金为主,由于镁铝合金成本较高,实际用量有限;表面材料正探索工程塑料、纤维等其他材料;纳米材料等仍在研发中,最终量产材料将选择性能优异且成本较低的方案。
Q:PEEK材料目前的用量及覆盖范围规模如何?
A:PEEK材料当前用量规模较大,但尚未确定以何种材料为主导,多种材料仍处于试验阶段。此前单机用量超过5公斤,后续进行了调整。目前相关合作包括:中兴福彩与小鹏合作供应PEEK树脂原料;中岩股份与小冯联合开发低磨耗等级PEEK产品,用于关节齿轮等部位以降低噪音。但最终采用哪家材料尚未明确。
Q:广州工厂Aaron机器人单日完成500颗螺丝安装的效率与人工相比处于什么水平?常见故障率及维护成本水平如何?
A:人工每日螺丝安装量约150-200颗,Aaron机器人效率约为人工的3倍。机器人搭载成本约50万元,试点故障率为0.5%,维护成本占比3%-5%,主要涉及灵巧手关节更换,单次更换成本约5000-1万元。
Q:灵巧手维护时是更换整个手,还是仅更换内部部件?
A:灵巧手维护时仅更换内部坏死关节,包含维护及调试成本,单次更换成本约5000~1万元,平均约8000元。