懂车帝智驾测试全解析

昨天仔细看了懂车帝长达3个小时的测试视频,这次测试封闭了一段真实的高速路和城市道路,制造了大量的故障场景和道具,组织了36款车测试了高速6个场景,26款车测试了城区9个场景,主持人东门健男共经历了216次碰撞。测试车涵盖目前主流车企车型,不同价位和硬件配置的都有,算是国内目前为止模拟程度最高的一次智驾极限事故工况测试。下面我对这些事故场景进行逐一介绍和解析。
一、高速场景测试

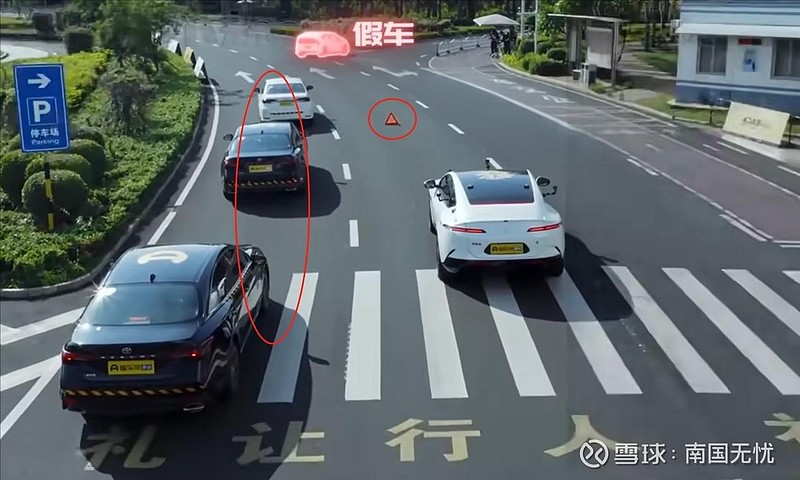
1、消失的前车
场景:高速行驶,前方阻挡视野的大车(绿框)突然变道,前方突现一辆事故车(红框)停在本车道,左边还有社会车辆(黄框)阻挡变道。
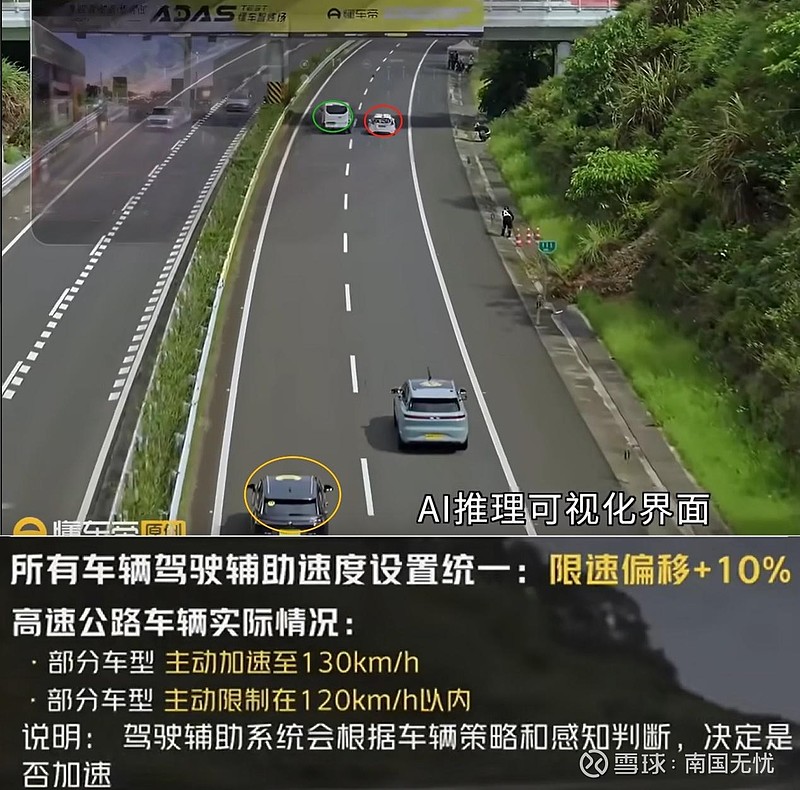
这个场景属于避让运动物体,能通过测试的几款车,能做到尽早启动AEB,并坚决AEB刹停到底。
其它没通过测试的车,要么是让速不让道,AEB启动不及时,尝试向左变道后放弃,时间错失AED已来不及。
争议点:
1)特斯拉跟车速度只有115km,而问界跟车有130km所以刹停不及时。
那这个130km是问界自己的智驾策略设定的跟车距离和速度,智驾策略就是需要根据前方车距设定合理车速,以保证突然出现消失的前车时,AEB能够及时刹停。
2)问界智驾选择变道但被驾驶员干预了,导致AEB来不及。
可是高速跟车距离和车速本来就应该保证,在不用变道的情况下,就能单纯通过AEB可以刹停,否则如果真出现旁边空间不足无法变道的场景,车速太高,车距太近,AEB刹停不了,那就可以心安理得的撞上去么?
3)质疑激光雷达对假车的反射信号识别率比真车低40%,所以识别出现漏判
假车就识别不了,那高速上出现其它不明物体是不是就可以理若当然的不去识别?人眼能够识别的异常物体,激光雷达识别不了,那只能说是激光雷达的问题,而不是异常物体的问题。
2、临时施工
场景:夜间高速行驶,前方突然出现限速标志、导流标识、锥桶(红框),左边还有社会车辆(黄框)阻挡变道。
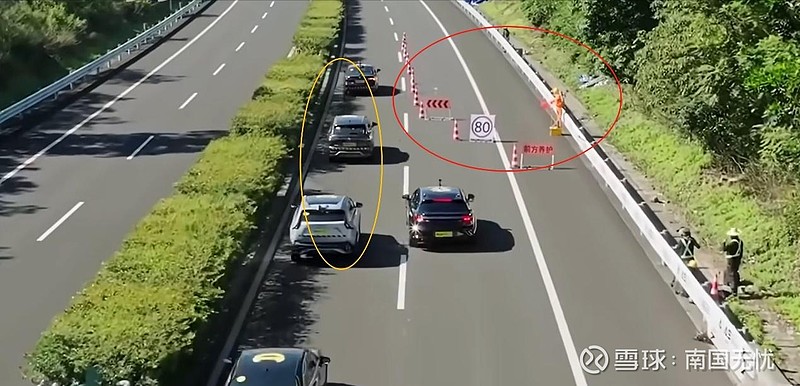
这个场景属于避让静止物体,能通过测试的车,都是能尽早识别各类标识,及时启动AEB刹停
没通过测试的车,要么是识别太晚了,又尝试变道不成功,或者根本没有识别到标识直接不降速撞上去。
3、施工路遇卡车
场景:夜间高速行驶,前方有一排锥桶提示施工区(黄框),同时路边停着一辆大卡车(红框),锥桶和大卡车之间有一条2.55m宽度通道,可以满足车慢速通过。

这个场景属于避让静止物体,配备了最强智驾硬件配置的问界M9,竟然识别不了减速标识和施工路牌,高速擦碰卡车而过,反倒是最便宜只有摄像头的比亚迪海鸥,识别出了减速标识并及时刹停,有点意外。而同属华为ads智驾,比问界M9激光雷达更少的问界M8反倒刹停了。
表现最好的是特斯拉model3,刹停后还是自己慢慢通过锥桶和卡车之间的通道。
4、高速惊现事故车
场景:夜间高速行驶,前方突然出现一辆事故车斜插入本车道(红框),事故车离路边缘2.4m宽度。
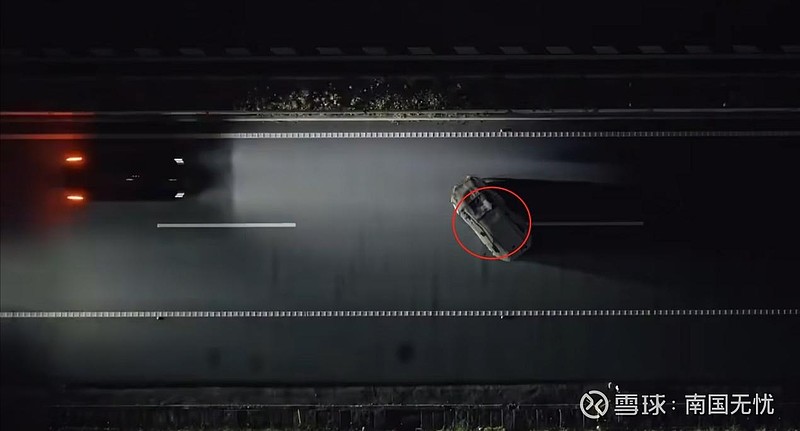
这个场景属于避让静止物体,看似很简单的一道测试题,很多车都是检测到事故车了,但执行AEB不坚决,还是直接撞上去了。
模型决策的过程黑盒,不可完全预测,规则兜底不彻底。
5、高速路口遇野蛮加塞
场景:高速行驶过路口,突现一辆车(红框)野蛮连续并行,侵入本方车道。

这个场景属于避让运动物体,很多车也是检测到了事故车,但是决策上犹犹豫豫,AEB没启动,就直接撞上去了。
6、莽撞横穿的猪
场景:高速行驶,突现一头野猪(红框)突然横穿公路,侵入本方车道。

这个场景属于避让运动物体,这个测试项对人来说难度不大,但对智驾来说属于地狱难度。全场只有4辆车有一些反应,只有1辆车modelX通过测试,很多车辆都是检测到了野猪,但是连降低车速的动作都没有。
二、城区场景测试

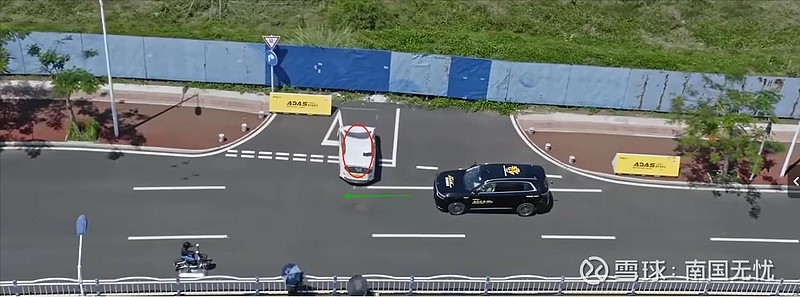
1、开进大转盘
场景:车辆通过一条直路汇入大转盘,汇入口有一辆障碍车(黄框),汇入后侧后方有一辆来车加速通过(红框)。

这个场景属于寻路避让运动物体,大多数车都能避开汇入口的障碍车,但是汇入后碰到侧后方加速来车,很多车就是没有减速动作,避让不及撞上了。智驾的侧向感知存在问题,不遵守交规,汇入时太靠近故障车,导致汇入后避让侧后方来车空间不足,包括问界M9这种智驾硬件武装到牙齿的车型。
2、转盘内汇入
场景:在大转盘内车辆让过社会车辆(红框),汇入转盘中心。

这个场景也属于寻路避让运动物体,考核车辆在临车遮挡的情况下,要具备自我规划寻路的能力。测试下来直接强行加塞的都不少,在马路上要被骂那种。
3、过马路4小学生
场景:直行,路右侧有2个骑电瓶车的(黄框),突然从电瓶车前面串出4个过马路的小学生(红框)。
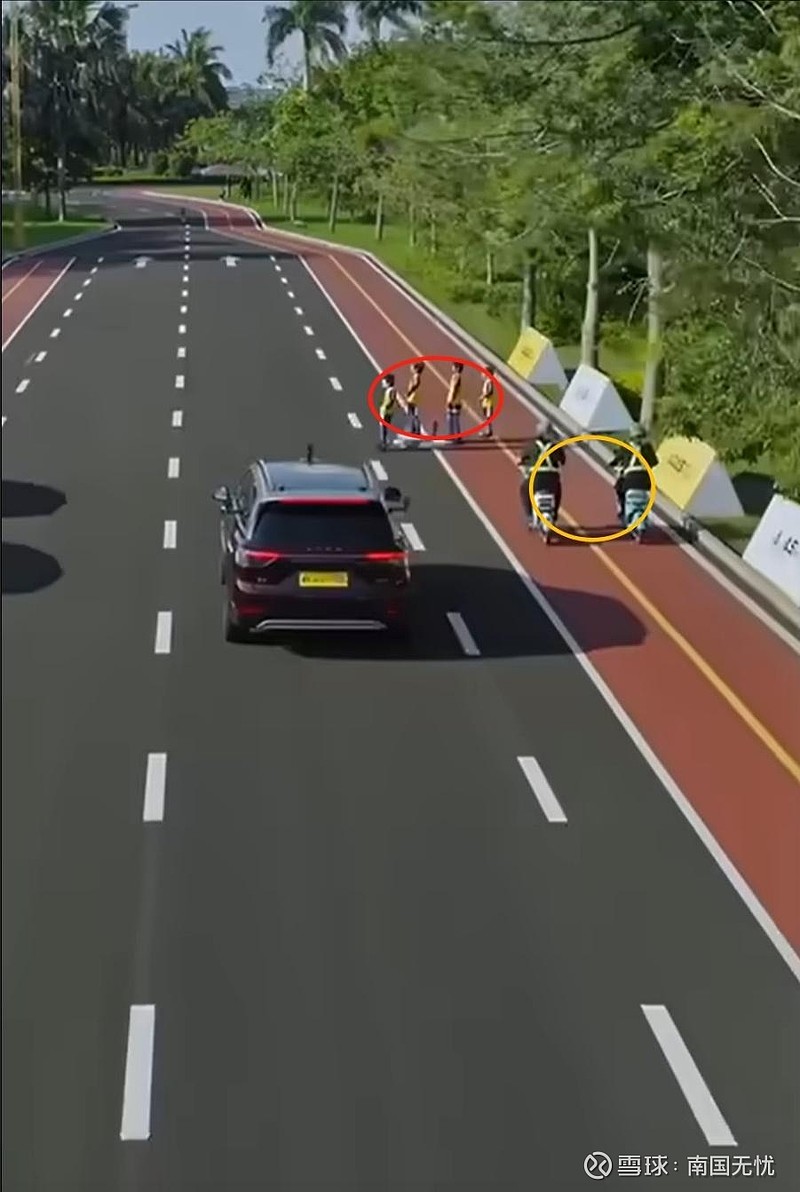
这个场景属于避让运动物体,类似避让鬼探头,很多车识别不了过马路的儿童,直接撞上去了。
4、平庸的掉头
场景:简单的三车道掉头。

这个场景属于单纯寻路,这个简单的掉头很多车都不知道怎么处理乱跑了。
5、故障车躲不躲
场景:直行,前方地面出现三角警示牌(红框),警示牌后面10米有辆静止的故障车,同时左侧有社会车流(黄框)。
这个场景属于避让静止物体,在左侧车流干扰下,很多车识别不了地上的三角标识撞上了,也有的车向左边车辆强行加塞。
6、盲区藏辆左转车
场景:直行通过丁字路口,左侧岔路口突然出现一辆左转车(红框)。

这个场景属于避让运动物体,在一个很开阔的路口,按理各种雷达应该能够准确探测到左转车,但是还是有很多车选择无责就不让,直接撞上左转车。能通过测试的车,基本都会在路口做预减速。
7、倒车难题
场景:直行通过斧头路,前方突然出现一辆车在倒车(红框),侵入本方车道。
这个场景属于避让运动物体,模拟的是真实城市行驶真实会碰到的场景,对于人类驾驶人很容易,看到前方有倒车自然会减速慢行,但对于智驾而言却是城区场景失败率最高的测试项目。
8、疯狂电瓶
场景:直行,侧前方同样直行的电动车突然变道(红框),侵入本方车道。

这个场景属于避让运动物体,人类看到侧前方有两轮电动车并行,本能就会离远一些,开慢一些。有的智驾车看到突然变道的电动车依然继续加速的,连提示警告都没有,最强的是靠NOA或者AEB主动刹车,提前减速直接避让。
9、斜刺电瓶和儿童过马路
场景:通过丁字路口左转时,左前方突然一辆电瓶车斜刺驶入(红框),转入左转车道后又碰到一个儿童过斑马线(黄框)。


这个场景属于避让运动物体,需要连续避让两个运动物体。人类驾驶员左转时存在一个A柱盲区,对于左前方斜刺进来的电动车容易没看到,智驾车用雷达摄像头没有盲区,应该相对人类有先天优势。左转时导航显示有两条左转车道,但配置ADS系统的车存在严重的加塞现象。
三、通过这次测试,可以得出如下事实
1、智驾表现的好坏不是靠堆硬件就行了,还是看模型和策略的优化水平,以及安全和效率的权衡。
2、测试的其实都是真实驾驶会碰到的场景,目前VLM-VLA模型识别标志牌、路障、异型物体的能力仍然非常有限。
3、同一车企的不同车型面对同一个场景,结果会不一样,说明现在模型在决策这块还是有一定随机性。同一款车对一个测试项目只测了一次,如果测多次,估计行为表现和结果都会不同。
4、小鹏、比亚迪、鸿蒙智行这些主流车企目前智驾水平大体相当,都还只是L2级别的水平,不存在像某些车企在ppt里宣传的那样,智驾水平能明显高于友商。
$比亚迪(SZ002594)$ $小鹏汽车-W(09868)$ $赛力斯(SH601127)$ #新能源车# #自动驾驶#