具身智能系列-2.1(减速器篇)


接上文,本文给大家介绍具身智能系列的重要零部件之一——减速器。
$绿的谐波(SH688017)$ $中大力德(SZ002896)$ $国茂股份(SH603915)$
减速器是一种作用于原动件与工作机之间的闭式变速传动装置,用于减小转速并增大扭矩。
说人话就是,减速器就是动力源连着小齿轮,小齿轮再连着大齿轮。电机转的飞快,带着小齿轮快快地转,而大齿轮则转的更慢,且转的更有劲。这俩齿轮就合称减速器。
下图为行星减速器:

通常动力源(一般是电机)给的动力,速度快而扭矩小,类似手动挡汽车的5档,但我们的日常机械传动需求是1档,所以减速器的作用就是给动力降档。
在人形机器人领域里,减速器既承担降档作用,也承担调整旋转运动的转动角度的作用。
根据不同口径,减速器可以分为圆柱齿轮、圆锥齿轮、蜗轮蜗杆、三环、摆线针轮、行星以及RV等多个种类。
这里乱七八糟的种类就不讲了,它们的应用领域也千奇百怪,譬如冶金、有色、煤炭、建材、船舶、水利、电力、工程机械及石化等等等吧。
这里只讲三种:谐波、RV、行星。
这仨都是应用于人形机器人领域的精密减速器。
精密减速器是啥?
你看啊,这俩齿轮,起到2作用,一曰传动,二曰调整角度,前者需要齿轮材料能承受住动力源给的动力而不崩坏,后者需要齿轮具备一定的精确度。
那以传动为主要职能的减速器就是一般传动减速器,以确保精度为主要职能的减速器就是精密减速器。
前者力气大,后者准度高。
人形机器人不是大挖机,不用干太重的活,但是对动精度要求很高,譬如给人类喂饭总不能喂进鼻孔,对吧。
所以这就必须要精密。
那要衡量精密,就得有具体指标,这里我把长江的图贴过来。
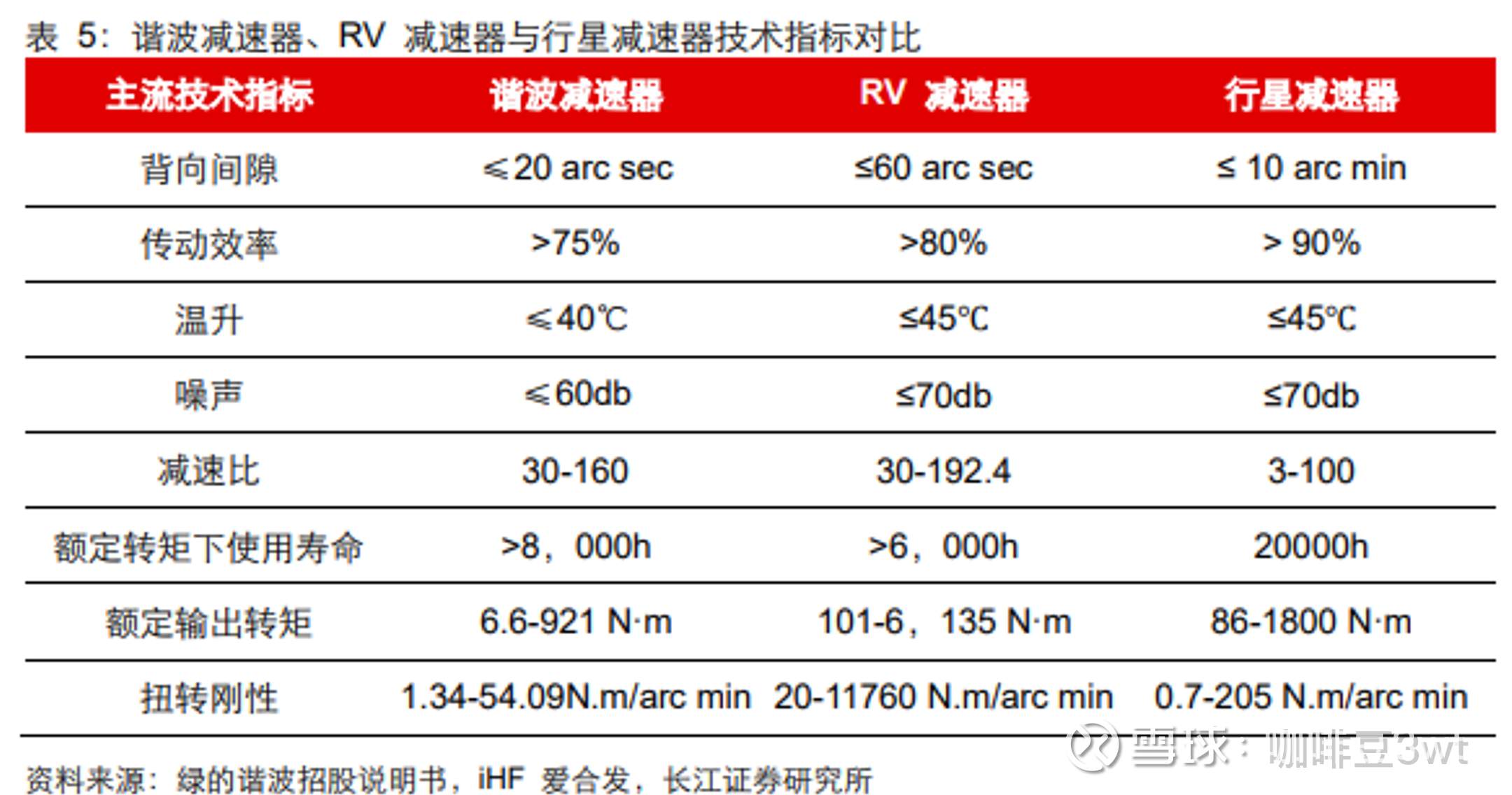
我一个一个给大家解释这些指标是什么意思,不想细究的同学跳过斜体字哈:
背向间隙:也叫背隙、侧隙,就像齿轮之间的“空隙”,这个值越小,机器运转时的精准度越高。输出端与减速器壳体均固定,在输入端施加±2%额定转矩顺时针和逆时针方向旋转时,减速机输入端有一个微小的角位移,此角位移就是背隙。谐波减速器表现最好(注意行星减速器的单位,它是误差最大的那个)。
传动效率:可以理解为“动力传递的利用率”,数值越高,说明动力在传递过程中浪费得越少,行星减速器的动力利用率是最高的,我推测这个是因为行星减速器的机械结构最简单,我非机械专业,所以不知道推测的对不对。
温升:就是工作时温度升高的幅度,温升小的话,机器不容易因为过热出问题,谐波减速器温升相对低些。这指标既与传动效率相关(浪费的能量越少温升越低),也与机械结构本身的散热能力相关,谐波最好。
噪声:机器工作的安静程度,谐波最好。
减速比:输入转速和输出转速的比例,能体现把转速降低多少的能力,这玩意,理论上你可以把小齿轮做的小小的,大齿轮做的大大的,以此来提高,也可以多放几个齿轮(多级减速)。RV减速器在这点比较顶。
额定转矩下使用寿命:行星减速器能用的时间最长,个人推测也与行星减速器的机械结构简单有关,而且谐波有个部件叫柔轮,那玩意靠本身的形变来工作,所以寿命必然是不得行。
额定输出转矩:能输出的最大力量,RV减速器能输出的力量最大,能干更重的活。
扭转刚性:抵抗扭转变形的能力。注意,就算是金属做的齿轮,受力后也会形变,只不过相较于软材料,形变的程度更低。但在精密传动领域,这个形变就很致命了。因此,扭转刚性的数值越高,说明受力形变程度越低,RV减速器在这方面表现突出,即很“抗扭”。
除上图外,还有一些其他指标,例如空程,即指在工作状态下,当输入轴由正向改为反向旋转时,输出轴在转角上的滞后量等等,我们不是专门的产业人士,大致了解到这里就可以了。
另:感兴趣的同学还可以去搜谐波减速器的工作动图,你一定会惊叹于机械老哥们的天才大脑。
那应用于机器人中,三种减速器的优劣各有什么呢?
依旧用长江的图:
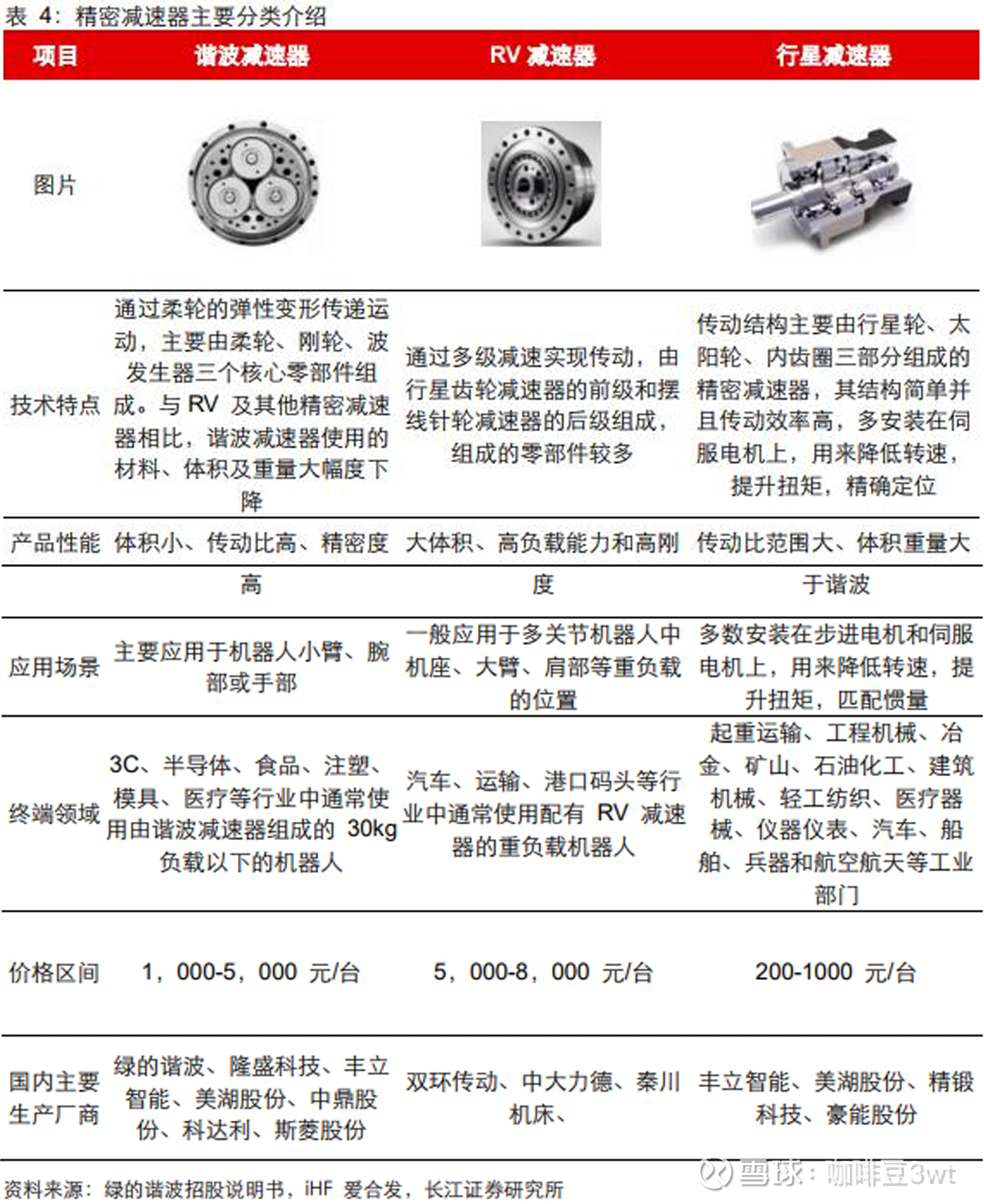
总结下重点:
1、谐波:小、轻、精度高、但负重最低,可用于上肢;
2、RV:大、重,贵、但可以高负载,可用于下肢或负重关节;
3、行星:便宜+便宜+便宜+便宜+便宜+皮实+皮实+皮实+皮实+皮实——2大优点,降本利器。
好,先写到这,欲知后事如何,且听下回分解。
爱你们![]()