人形机器人拆解第一弹 为什么丝杠是制造难度的巅峰


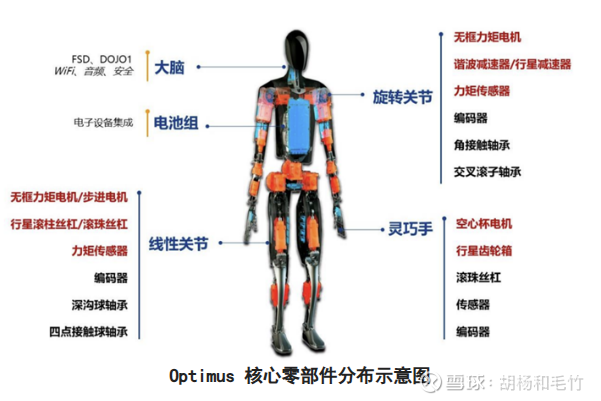
在特斯拉Optimus定型量产的前夜,也就是2025年12月这个时间节点,整个硬件产业链中最具张力的环节无疑是行星滚柱丝杠。这不仅仅是因为它在BOM成本表中占比极高,更因为它是决定机器人运动性能的物理底座。
人形机器人不同于工业机械臂。底盘固定的机械臂只需要旋转,但人形机器人需要双足行走、深蹲甚至跳跃。这就要求腿部关节必须具备极高的扭矩密度。
早期的波士顿动力采用液压驱动,力量大但体积庞大,且存在漏油维护难题,无法商业化。特斯拉Optimus选择了纯电驱方案,这就带来了一个物理难题:电机擅长的是高速旋转,如何把这种旋转运动转化为腿部强有力的直线推拉运动?
引用 网页链接
普通的滚珠丝杠无法胜任,滚珠丝杠内部是点接触,当机器人自重加上跳跃时的冲击力作用在关节上时,钢球极易碎裂或磨损。
解决方案是行星滚柱丝杠。它利用螺纹滚柱替代滚珠,将点接触转化为线接触。
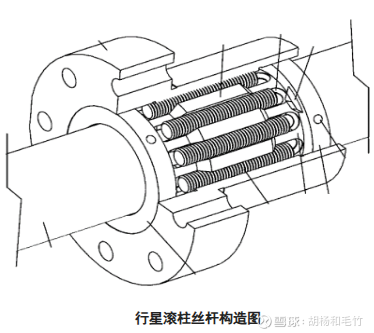
这种结构使得其承载能力是同体积滚珠丝杠的数倍,寿命更是长达15倍。可以说,没有行星滚柱丝杠,电驱人形机器人就无法站立。
制造难度的巅峰与国产化的死结
既然技术路径确定,为什么说它是制造难度的巅峰?因为这里存在一个巨大的成本与精度的剪刀差。在工业领域,行星滚柱丝杠长期被瑞士Rollvis、GSA和瑞典SKF垄断,单价高达数千甚至上万元人民币。而马斯克给Optimus设定的整机成本目标是2万美元。这意味着单根丝杠的成本必须压缩到几百元人民币。
从一万降到几百,这在传统制造业看来是不可能的任务。
难点主要集中在三个方面
第一是设备壁垒。丝杠的螺纹加工精度要求达到微米级。目前顶级的高精度螺纹磨床主要依赖欧洲和日本进口,产能受限且价格昂贵。
第二是热处理工艺。丝杠材料通常采用高强度合金钢,热处理过程中极易发生变形。硬度不够会磨损,硬度太高会脆断。如何在保证硬度的同时控制变形量,是各家企业的核心机密。
第三是检测环节。行星滚柱丝杠内部结构复杂,任何一个滚柱的尺寸误差都会导致传动卡死。在大规模量产下保证良率,是比生产原型机难上一百倍的挑战。
产业链的破局与投资逻辑
基于上述难点,国内供应链的破局思路非常清晰:以车代磨与工艺协同。
如果完全依赖进口磨床,成本永远降不下来。现在的核心逻辑是利用国内成熟的车削工艺进行粗加工,再用磨削进行精加工,甚至探索全车削工艺。谁能把这套降本工艺跑通,谁就能拿走特斯拉数百万台机器人的订单。
北特科技的逻辑在于底盘工艺的平移。作为汽车底盘零部件厂商,北特在配合特斯拉进行高精度杆件制造方面积累了大量经验。其优势在于大规模的车削、磨削以及热处理能力。人形机器人的丝杠本质上是高精度的轴类部件,这与北特的技术栈高度重合。机构调研显示其在工艺降本上的配合度极高,是目前量产确定性较强的标的。
五洲新春的逻辑在于组件积累。作为轴承行业的隐形冠军,丝杠结构与轴承有异曲同工之妙。五洲新春在磨床设备储备和滚子加工方面具备先发优势。
贝斯特和恒立液压也是不可忽视的玩家。恒立液压虽然以液压件著称,但其精密加工能力处于国内顶尖水平,且具备极强的资金实力进行设备投入。
2026年是人形机器人的量产元年,而2025年底就是供应链定点的生死时刻。
丝杠环节之所以享受高估值,是因为它是从0到1的纯增量市场,且具备极高的技术护城河,当各家出货数据落地时,也是丝杠厂商良率爬坡和业绩兑现的开始。
在这个赛道里,我们赚的不是周期的钱,而是技术壁垒和国产替代的钱。重点关注那些设备到位早、送样进度快、工艺降本路径清晰的企业。