征和工业——链系统技术领导者

2026年1月6日将正式发布全球首创链式灵巧手。具备7个主动自由度,兼顾大负载、长寿命、高精度、轻量化变等优势,单链最大负载30kg+(优于连杆&腱绳),目前已获得多个终端客户的认可(智元、新剑等)。其中,微型链已向部分机构送样、甚至获得小批量订单。
机器人灵巧手作为人形机器人与环境交互的核心部件,其性能表现依赖于多技术模块的协同配合。从动力输出到精准控制,电机、减速机、换向结构、传动结构、传感器等关键组件形成完整技术体系:电机提供驱动力,空心杯电机、微型无框力矩电机和轴向磁通电机各有千秋;减速机负责调节转速与扭矩,行星减速器、谐波减速器分别适配不同精度与负载场景;换向结构通过蜗轮蜗杆、行星滚珠丝杆、锥齿轮等实现动力方向转换,解决电机与关节转动轴垂直的适配问题;传感器包括触觉传感器、六维力传感器、温度传感器、接近觉传感器、电子皮肤等,为精细操作提供力反馈与位置感知;而传动方式作为动力传递的核心路径,直接决定了灵巧手的灵活性、精度与耐久性,是整个技术体系的关键环节。
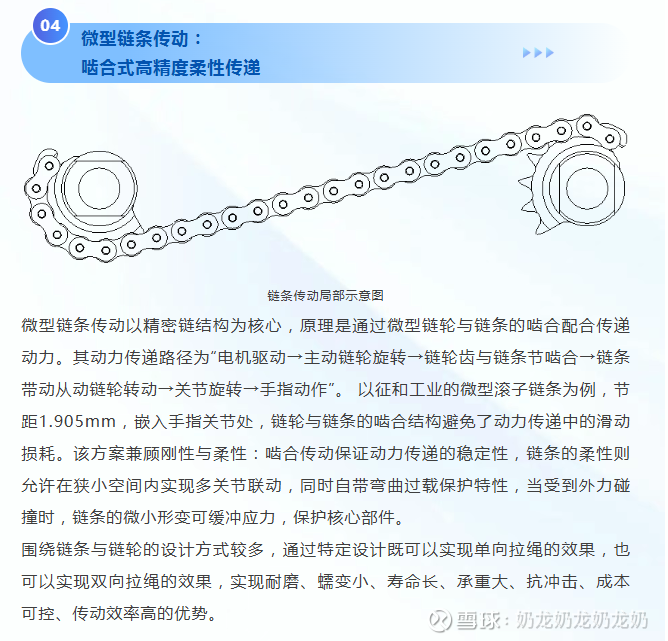
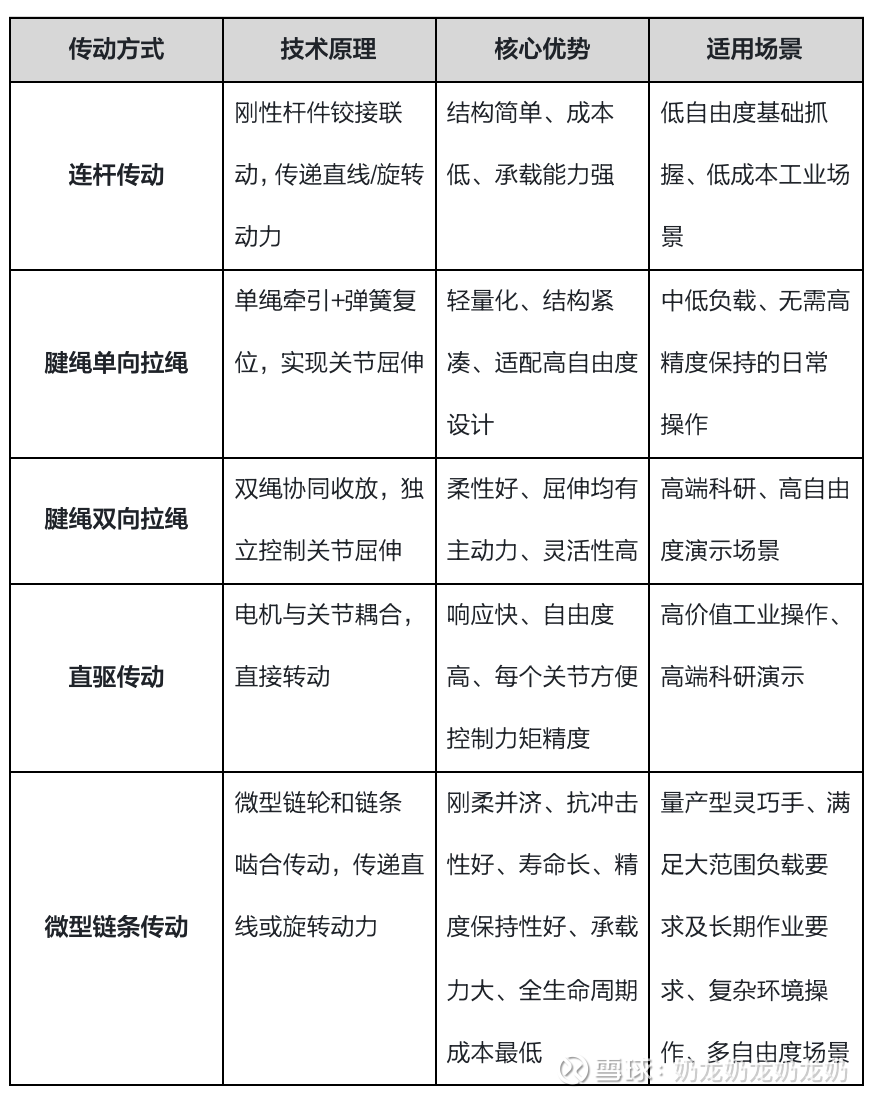
当前主流传动方式分为连杆、腱绳(含单向/双向拉绳)、直驱三类,各有独特技术原理与适用场景,而微型链条传动的出现,为传动技术提供了新的优化方向。


微型链条传动已通过实测验证,并已小批量交付江淮前沿技术协同创新中心,应用于具身智能机器人的视触融合灵巧手研发。该灵巧手对传动系统的高负载、抗冲击、高精度要求,与微型链条的技术特点高度契合,其模块化手指驱动传动机构通过微型链条,实现了近指关节、远指关节及指根关节的精准动力传输,同时,链式传动灵巧手总成已与人形/工业机器人本体厂商开展联合研发及适配。从行业发展来看,人形机器人正朝着规模化量产方向推进,对传动技术的可靠性、低成本、适配性要求日益提高。微型链条传动方案为量产型灵巧手提供了兼顾性能与实用性的解决方案。
随着技术的进一步迭代,微型链条传动有望在工业机器人、服务机器人、医疗康复机器人等领域获得更广泛应用,推动灵巧手技术向更高效、可靠、经济的方向发展,为人形机器人走进实际应用场景奠定核心基础。