FSD方案跑robotaxi,一个特斯拉粉丝喜欢听的骗局

不得不说,马斯克是一个讲故事的高手,买一辆车,上班送你去公司,下班车自己去跑robotaxi赚钱,下班接你回家,买一辆车,2年回本,就问你心不心动,买不买。。。
说完梦想,我们切换到工程视角:
1. 对于L2辅助驾驶的方案来说,FSD V14是个非常好的方案,效率不错,成本低,类人类顺滑。甚至部分美国特斯拉车主刷出一个月零接管的记录,惊为天人,觉得水平在大多数情况下超过了人类。但记住,这是个辅助驾驶,特殊时刻需要车主接管,出了问题责任是分散在车主身上的。
2. 人类 或者说 特斯拉FSD这种偏黑盒的处理问题的逻辑,在面对大量级重复性工作的时候,稳定性是不够可靠的,不能理解的我就问两个简单的问题:
让你重复算10万遍100以内的加减乘除,谁能保证完全不出错。但这个你把它塞给一个128K的计算机规则程序能保证不出错。
你这辈子从记事起到现在走路摔过跤吗
3. 那回到L4级别的无人出租车业务,首先要明确,这个出了问题是需要特斯拉或者waymo这种运营方负责的。那这个逻辑就完全变了,对于一个目标是运营大规模车队的解决方案来说,他的第一性原理是什么?
L4的第一性原理是绝对的可靠性;L4的第一性原理是绝对的可靠性;L4的第一性原理是绝对的可靠性。重要的事情说三遍,后面要考
从一个大规模(假设是10万辆)运营的无人出租车车队来说,99%的可靠性是灾难的,99.9%的可靠性也是灾难的,99.99%的可靠性也是灾难的。99.99%的可靠性和99.9999%的可靠性是完全不同的概念,虽然在L2的辅助驾驶方案上95%的可靠性就是不错的方案。
我们把更实操的数据来代进去,人类司机的事故发生率大概是几万公里出一次事故,我们假设特斯拉特别牛逼能做到几十万公里甚至几百万公里出一次事故。但这种模拟人类操作的黑盒逻辑,做过开发的同学都知道,从90分做到99分,和从99分做到99.9分是完全不同的难度,再往前一步那就是不可想象的难度,不理解的同学再想想让人做十万遍加减乘除的例子。
几百万公里出一次事故,这对于L2的辅助驾驶来说,简直牛逼的起飞了。但这对于运营十万级别的出租车队意味着什么呢?
一辆出租车假设一天跑200公里,十万辆那就是一天跑2000万公里,嗯,接下来我就不继续计算了,再算怕特斯拉赔破产。
4. 我们再进一步就具体方案来说一下,为什么特斯拉这个方案的尾部可靠性到一定程度就很难继续突破了。先来看看FSD和waymo方案的差异
waymo:多传感器冗余、依赖高精地图开城只在特定区域运营、强规则兜底 — 就像一个只会加减乘除的计算器,不聪明,但边界明显,主打稳定性
FSD:视觉主导、黑盒逻辑(模拟人)、低成本高通用。— 就像奥数选手做加减乘除,主打低成本和通用性,大部分时候手拿把掐,还是那句话,奥数选手做十万道100以内的加减乘除试试
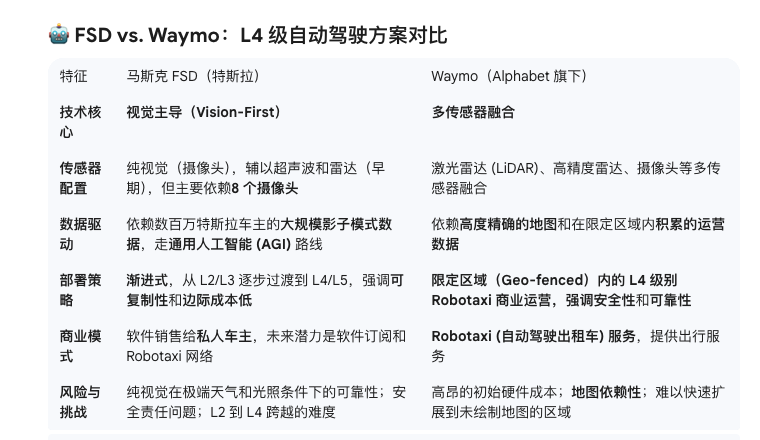
从上面的对比可以看出,waymo的第一性原理是可靠性;而特斯拉的第一性原理是低成本高效率,通过迭代解决稳定性的问题。
但还是那句话,让一个奥数选手做10万道加减乘除,几乎是不能保证100%正确的,如果不行,变成100万道,这是人类的特性决定的。
针对一些特殊情况,比如建筑物遮挡或者垃圾袋一阵大风突然吹过来挡住了摄像头,FSD这个方案是没法处理的,他都不知道路边在哪。而waymo不仅还有其他激光、雷达,而且他的高精度地图是知道路边在哪的。因为waymo是个高成本高冗余的逻辑。
至于前几天的旧金山停电waymo停摆,那更有意思了,从L4稳定性第一位的大原则下,红绿灯停了,那停摆就是最好的选择,别杠,杠就是你对。
最后,针对特斯拉粉丝的FSD可以不断进化的观点,再说一遍,人类计算一百万道加减乘除不可能全对,FSD不改变方案,没有可能,就这么简单。
最后的最后,特斯拉robotaxi哪天无人大规模运营的时候,就是灾难的开始,不信走着瞧![]()
鉴于太多义务教育阶段不合格的人看不懂我在说啥,我自己概括一下本文的核心思想:robotaxi现在的路测可靠性差,跑的里程短,技术路线天花板逻辑上低。waymo为代表的多传感冗余、强规则兜底、通过高精地图先开城的策略现在看不管实际运营还是理论可靠性,比robotaxi路线高1-2个数量级。robotaxi现在的可靠性不具备大规模运营的基础,将来我也不觉得具备。