机器人研究系列21-特斯拉V3到底是金属丝腱绳还是UHMWPE 纤维腱绳

$骏鼎达(SZ301538)$ $南山智尚(SZ300918)$ $大业股份(SH603278)$
【骏鼎达-键绳材料对比研究】
A. 灵巧手方案信息更新:
1. 腱绳方案逐步成为国内外共识。腱绳传动是 Tesla、Shadow Robot 等海外厂商普遍采用的传动方案,国内厂商今年也逐步从齿轮/连杆等方案向腱绳传动过渡,灵心巧手 Linkerbot 的 L30以及灵巧智能的 DexHand021 均采用腱绳传动方案,分别拥有 25/19 个自由度。腱绳传动是人形机器人灵巧手的主流传动方式,特斯拉Optimus灵巧手创新型采用“行星齿轮箱+丝杠+腱绳”结构,奠定腱绳材料在灵巧手系统中的核心地位。
2. 材料对比选择-UHMWPE纤维:
1) 中国是 UHMWPE 的主要生产基地之一,2023 年产量达 1.33 万吨,占全球总产量 2.68 万吨的 49.7%。UHMWPE 纤维全球市场集中度较高,2023 年 CR3 达 75.16%,头部企业包括美国埃万特、美国霍尼韦尔、日本 Toyobo 以及中国的九州星际、同益中、南山智尚等,其中南山智尚拥有自研抗蠕变型 UHMWPE 专利,拉伸强度达 42cN/dtex,处于国内第一梯队。
2) 应用方向:除灵巧手外,UHMWPE 还可用于机器人关节、外壳增强、骨架材料等领域,人形机器人大规模应用后带动的需求量有望进一步提升。
3) 对比金属丝优势:当前腱绳材料的主流选择主要是两种,高强度钢丝(金属丝)、超高分子量聚乙烯纤维(UHMWPE)。相同粗度UHMWPE纤维承受的最大质量约为钢丝绳的8倍,强度是钢材的16倍,其质量与强度之比较芳纶高出四成,是目前世界上强度最高的聚合物纤维。UHMWPE纤维具有卓越的力学性能、突出的耐冲击性能、优异的耐磨性能、稳定的耐化学腐蚀性、良好的耐光性、良好的疏水性、耐水耐湿性、电绝缘性和较长的曲折寿命(上证机器人观点)。UHMWPE 纤维强度高、自重低,模量较大,契合灵巧手对腱绳材料的需求。但缺点是抗蠕变性能以及抗高温能力不及高强度钢丝,有望通过材料技术升级或 UHMWPE&高强度钢丝共用解决。
备注:模量较大” 中的 “模量” 指弹性模量(如杨氏模量),是衡量材料抵抗弹性变形能力的核心指标(应力与应变的比值,数值越大,材料越不容易被拉伸 / 压缩变形)。
4) 下游应用领域:
a) 手术:比如南山智尚,通过达芬奇手术机器人首轮测试(YJH),正在进行生物学风险五项测试,若通过可出货手术腱绳(属于易耗品):单次手术3-5根,单根15cm,每3次手术更换一波。据直观医疗数据,2024年全年达芬奇手术系统外科手术量约268万例(且仍以年均15%复合增速增长),按单次平均40元成本,对应潜在空间约1亿+。
b) 养老:目前主要是手部包覆材料(单只手500元,一双1000元),比如南山智尚,已二次送样深圳头部通讯企业养老机器人,且对接送样上海头部机器人企业。
c) 情趣:预计可供腱绳+尼龙66外衣+四肢轻量化材料,合计价值量占比约1/3,比如南山智尚,目前已对接国内企业(预计26年销5万台,27年10万台),腱绳通过测试,尼龙66外衣测试中。
5) ASP:订单落地(单价维持200元/米);
6) 制备技术:超高分子量聚乙烯纤维的多种制备方法目前只有冻胶纺丝-超倍拉伸法应用最成熟且实现了工业化生产。
3. UHMWPE纤维和金属丝性能指标对比:
1) 强度(拉伸强度与比强度,cN/dtex)-相同重量下,UHMWPE纤维拉伸强度大于金属丝腱绳的数倍:
a) UHMWPE纤维拉伸强度极高,通常可达 30–50 cN/dtex(如国内企业同益中产品达 42.5cN/dtex,南山智尚达 42cN/dtex)。更关键的是 “比强度”(强度 / 密度)优势显著 ——UHMWPE 密度仅约 0.97g/cm³,远低于金属(钢密度约 7.85g/cm³)。因此,相同重量下,UHMWPE 纤维能提供远超金属丝的拉伸力,是 “轻量化 + 高强度” 的核心选择。
b) 金属丝腱绳绝对拉伸强度不错(钢丝约 20–40 cN/dtex,依规格 / 工艺波动),但密度大导致比强度远低于UHMWPE。若追求与 UHMWPE 同等强度,金属丝的重量会是前者的数倍,严重拖累机器人灵巧手的轻量化与运动能效。
c) 备注:拉伸强度的单位是cN/dtex(厘牛 / 分特),这是纺织纤维领域常用的拉伸强度指标单位。其中,“cN” 是力的单位 “厘牛”,“dtex” 是纤维线密度单位 “分特”,该指标表示每分特的纤维所能承受的拉伸力大小,数值越大,说明纤维的拉伸强度越高。
2) 耐磨性(UHMWPE纤维腱绳大于金属丝腱绳):
a) UHMWPE 纤维腱绳自身具有自润滑性,表面光滑,干摩擦或轻度润滑环境下磨损率极低。且纤维的 “柔性接触” 可分散摩擦应力,减少局部过度磨损,适合腱绳反复摩擦的场景。
b) 金属丝腱绳耐磨性依赖表面处理(如镀锌、镀铬):未经特殊处理的钢丝易生锈,磨损后产生金属屑,污染腱绳系统并缩短寿命;经硬化处理的金属丝耐磨性提升,但自润滑性差,需额外添加润滑剂,增加系统复杂度与维护成本。
3) 抗蠕变性能(UHMWPE纤维腱绳小于金属丝腱绳):
a) UHMWPE 纤维腱绳蠕变(恒定应力下应变随时间增加的现象)是高分子材料的固有挑战,但国内企业通过技术优化(如南山智尚 “自研抗蠕变专利”、同益中 “参与制定抗蠕变标准”),已大幅提升抗蠕变能力。在机器人腱绳 “长期小载荷” 场景下,形变量可控制在合理范围,满足服役需求。
b) 金属丝腱绳:金属(尤其是钢)的抗蠕变性能更优,长期应力下应变增长更缓慢,尺寸稳定性强。但轻金属(如铝合金丝)的抗蠕变性能反而不如 UHMWPE,需根据场景选择金属类型。
4) 实现同等强度的生产成本(UHMWPE纤维腱绳小于金属丝腱绳):
a) UHMWPE 纤维腱绳:生产工艺复杂(如凝胶纺丝法),但原材料成本低于金属,且国内规模化生产后,成本持续下降。从 “单位强度所需成本” 看,因 UHMWPE 比强度高,实际应用中 “强度成本比” 更具优势。
b) 金属丝腱绳:原材料(钢材等)成本稳定,但加工成本高(拉拔、表面强化等工序),且因密度大,“满足同等强度所需的金属丝重量” 是 UHMWPE 的数倍。若结合 “强度需求” 的综合成本,UHMWPE 更具竞争力。
5) 弯折次数(耐疲劳性,UHMWPE纤维腱绳大于金属丝腱绳):
a) UHMWPE 纤维腱绳:纤维的柔性本质使其耐疲劳性极佳,反复弯折时应力集中小,不易产生裂纹,弯折次数可达数百万次甚至更多,完全匹配机器人灵巧手腱绳高频运动 的需求。
b) 金属丝腱绳:耐疲劳性依赖直径与工艺,细钢丝反复弯折时,易因应力集中产生疲劳断裂,弯折次数通常仅 “数十万次”;大直径或经 “疲劳强化” 的金属丝耐疲劳性提升,但柔韧性下降,不利于灵巧手的 “精准、灵活运动”。
6) 结论:综合各项参数对比,UHMWPE 纤维腱绳在单位重量下强度更高,更耐磨,弯折次数更高,单位生产成本可能更低,但是UHMWPE 纤维腱绳在抗蠕变和耐高温下不如金属丝腱绳。两者各有优劣,但结合目前主流观点,依然是UHMWPE 纤维腱绳在消费级机器人灵巧手上是主流方案。
B. 机器人专家Scott Walter访谈资料研究:
1. 原文访谈形式:Youtuber Devang Adhyaru 采访了机器人专家Scott Walter,他也是人形机器人 + AI”领域的领军声音之一,一起讨论了Optimus的进展,值得注意的是,Scott Walter并不在特斯拉任职,所讲的内容也仅仅是他的推测。
2. 小作文疑问一(是否用金属丝的推导):
1) 小作文原文:斯科特提到,相比上一代使用卷线盘+伞齿结构的方案,Gen3 采用更小型的线性执行器,直接驱动“肌腱”,避免金属丝频繁弯折。即#T灵巧手腱绳材料使用金属丝得到确认,此前金属丝腱绳卷绕在卷线盘上,弯折较为频繁,新一代方案直接使用#丝杠带动金属丝腱绳直线运动,避免了金属丝腱绳频繁弯折;
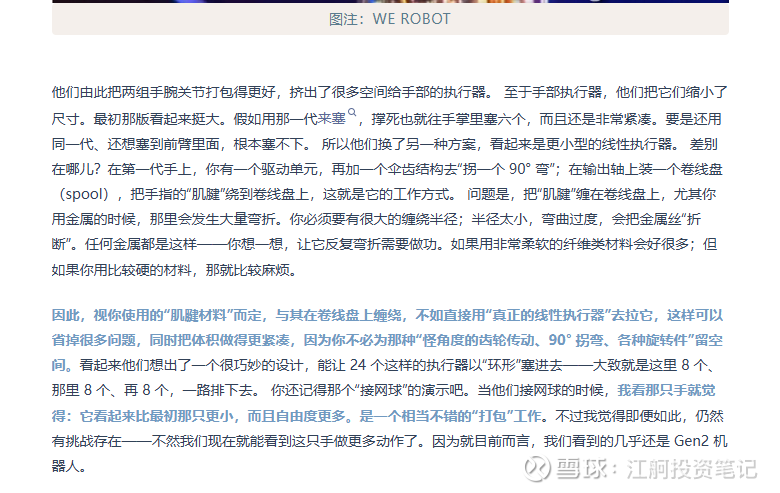
2) 实际新闻稿访谈原文:他们由此把两组手腕关节打包得更好,挤出了很多空间给手部的执行器。 至于手部执行器,他们把它们缩小了尺寸。最初那版看起来挺大。假如用那一代来塞,撑死也就往手掌里塞六个,而且还是非常紧凑。要是还用同一代、还想塞到前臂里面,根本塞不下。 所以他们换了另一种方案,看起来是更小型的线性执行器。 差别在哪儿?在第一代手上,你有一个驱动单元,再加一个伞齿结构去“拐一个 90° 弯”;在输出轴上装一个卷线盘(spool),把手指的“肌腱”绕到卷线盘上,这就是它的工作方式。 问题是,把“肌腱”缠在卷线盘上,尤其你用金属的时候,那里会发生大量弯折。你必须要有很大的缠绕半径;半径太小,弯曲过度,会把金属丝“折断”。任何金属都是这样——你想一想,让它反复弯折需要做功。如果用非常柔软的纤维类材料会好很多;但如果你用比较硬的材料,那就比较麻烦。因此,视你使用的“肌腱材料”而定,与其在卷线盘上缠绕,不如直接用“真正的线性执行器”去拉它,这样可以省掉很多问题,同时把体积做得更紧凑,因为你不必为那种“怪角度的齿轮传动、90° 拐弯、各种旋转件”留空间。
3) 对比纠正:Scott Walter在谈到特斯拉GEN2时,提到的原文意思是,第二代的驱动单元+伞齿结构拐一个 90度弯+输出轴卷线盘,这个结构当时用金属丝腱绳会导致大量弯折,导致金属丝折断,而UHMWPE 纤维腱绳会好很多,这也侧面说明了UHMWPE 纤维腱绳弯折次数更高,而且原文也说视使用的肌腱材料而定,并非确定是金属丝腱绳为最终方案,小作文属于是片面获取资料,张冠李戴了,而且这些还只是Scott Walter的猜测。
3. 小作文第二点没有疑问(确定会用腱绳):
1) 小作文原文:机器人专家斯科特在最近的采访中谈到,T采用混合方法——即腱绳用于屈伸,而机械连杆用于外展和内收(如韩国WIRobotics公司的机器人手),这能兼顾力量、精度和握力,该方案一个主动自由度需要一根腱绳,符合腱绳空间测算预期;
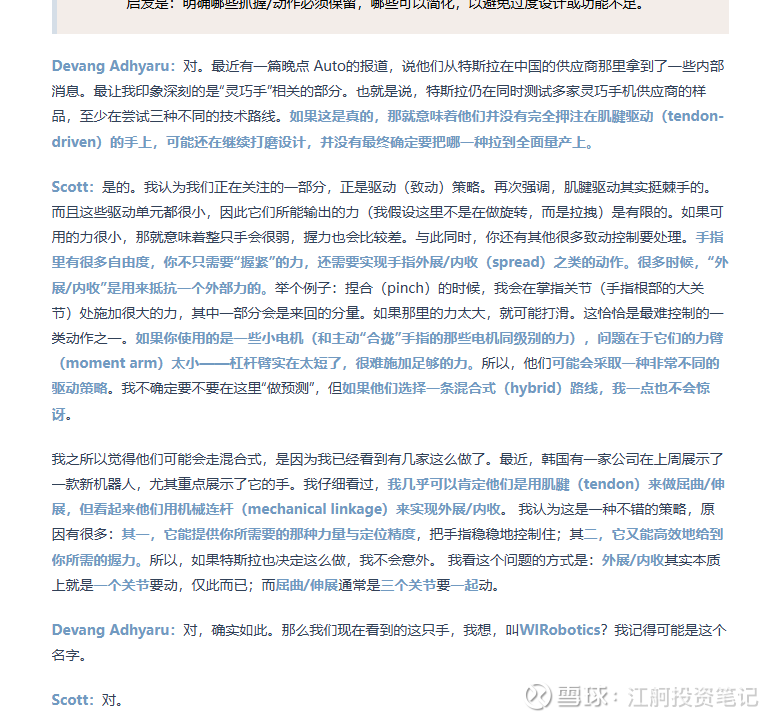
2) 实际新闻稿访谈原文:我不确定要不要在这里“做预测”,但如果他们选择一条混合式(hybrid)路线,我一点也不会惊讶。我之所以觉得他们可能会走混合式,是因为我已经看到有几家这么做了。最近,韩国有一家公司在上周展示了一款新机器人,尤其重点展示了它的手。我仔细看过,我几乎可以肯定他们是用肌腱(tendon)来做屈曲/伸展,但看起来他们用机械连杆(mechanical linkage)来实现外展/内收。 我认为这是一种不错的策略,原因有很多:其一,它能提供你所需要的那种力量与定位精度,把手指稳稳地控制住;其二,它又能高效地给到你所需的握力。所以,如果特斯拉也决定这么做,我不会意外。 我看这个问题的方式是:外展/内收其实本质上就是一个关节要动,仅此而已;而屈曲/伸展通常是三个关节要一起动。
3) 结论:首先这是Scott Walter的猜测,其次用腱绳方案没有太大疑问,都是这么猜测的。
综上结论,UHMWPE 纤维腱绳作为V3的主流方案依然没有任何疑问,依然是大概率事件,本次小作文完全是对新闻稿的曲解和张冠李戴。更有一些不专业的券商卖方还在以讹传讹,简直是贻笑大方。
附上原文访谈稿链接:
免责声明:以上内容均为公开数据推导,力争做到有证可靠,有据可依,不代表买入意见,不代表上市公司观点,仅供研究讨论交流公司基本面用,未来新信息更新还会不断修正,也欢迎各位球友提供修改意见,股市有风险,估值随着人心随时变动,据此买卖,后果自负。